



150:1 Metal Gearmotor 37Dx73L mm 12V with 64 CPR Encoder (Helical Pinion)
In stock, ships same business day if ordered before 2PM
Fastest delivery: Tomorrow*
Disclaimer:
For next-day delivery, the shipping address must
be in the AusPost next-day network, eParcel Express must be selected, and the order must be placed
before 2PM AEST Mon-Thurs excluding NSW Public Holidays. Orders may be delayed due to AusPost
pickup timings and order verifications. eParcel Express is typically a 1-day service within the
AusPost next-day network, though it is sometimes 2+ days.
Quantity Discounts:
- 5+ $117.77 (exc GST)
- 10+ $114.09 (exc GST)
Measuring 37 mm (1.46") in diameter, these brushed DC gearmotors are the largest and most powerful Pololu carry. They are available in a range of gear ratios from 6.3:1 to 150:1 and with 12 V or 24 V motors, and all versions are available with integrated 64 CPR quadrature encoders on the motor shafts. The 12 V and 24 V motors offer approximately the same performance at their respective nominal voltages, with the 24 V motor drawing half the current of the 12 V motor. See the 37D metal gearmotor datasheet (2MB pdf) for more information, including detailed performance graphs for each gearmotor version. You can also use Pololu's dynamically sortable 37D gearmotor comparison table to search for the version that offers the best combination of speed, torque, and current draw for your particular application. A more basic comparison table is available below.
| Rated Voltage | Stall Current | No-Load Current | Gear Ratio | No-Load Speed (RPM) | Extrapolated Stall Torque | Max Power (W) |  Without Encoder |  With Encoder | |
|---|---|---|---|---|---|---|---|---|---|
| (kg · cm) | (oz · in) | ||||||||
| 12 V | 5.5 A | 0.2 A | 1:1 (no gearbox) | 10,000 | 0.5 | 7 | – | – | item #4750 |
| 6.3:1 | 1600 | 3.0 | 42 | 12 | item #4747 | item #4757 | |||
| 10:1 | 1000 | 4.9 | 68 | 12 | item #4748 | item #4758 | |||
| 19:1 | 530 | 8.5 | 120 | 12 | item #4741 | item #4751 | |||
| 30:1 | 330 | 14 | 190 | 12 | item #4742 | item #4752 | |||
| 50:1 | 200 | 21 | 290 | 10 | item #4743 | item #4753 | |||
| 70:1 | 150 | 27 | 380 | 10* | item #4744 | item #4754 | |||
| 100:1 | 100 | 34 | 470 | 8* | item #4745 | item #4755 | |||
| 131:1 | 76 | 45 | 630 | 6* | item #4746 | item #4756 | |||
| 150:1 | 67 | 49 | 680 | 6* | item #2829 | item #2828 | |||
| 24 V | 3 A | 0.1 A | 1:1 (no gearbox) | 10,000 | 0.55 | 8 | – | – | item #4690 |
| 6.3:1 | 1600 | 3.5 | 49 | 14 | item #4688 | item #4698 | |||
| 10:1 | 1000 | 5.5 | 76 | 14 | item #4689 | item #4699 | |||
| 19:1 | 530 | 9.5 | 130 | 13 | item #4681 | item #4691 | |||
| 30:1 | 330 | 15 | 210 | 13 | item #4682 | item #4692 | |||
| 50:1 | 200 | 23 | 320 | 12 | item #4683 | item #4693 | |||
| 70:1 | 140 | 31 | 430 | 10* | item #4684 | item #4694 | |||
| 100:1 | 100 | 39 | 540 | 8* | item #4685 | item #4695 | |||
| 131:1 | 79 | 47 | 650 | 6* | item #4686 | item #4696 | |||
| 150:1 | 68 | 56 | 780 | 6* | item #4687 | item #4697 | |||
| * Output power for these units is constrained by gearbox load limits; spec provided is output power at max recommended load of 10 kg·cm. | |||||||||
Note: The listed stall torques and currents are theoretical extrapolations; units will typically stall well before these points as the motors heat up. Stalling or overloading gearmotors can greatly decrease their lifetimes and even result in immediate damage. The recommended upper limit for continuously applied loads is 10 kg-cm (150 oz-in), and the recommended upper limit for instantaneous torque is 25 kg-cm (350 oz-in). Stalls can also result in rapid (potentially on the order of seconds) thermal damage to the motor windings and brushes; a general recommendation for brushed DC motor operation is 25% or less of the stall current.
In general, these kinds of motors can run at voltages above and below the nominal voltages; lower voltages might not be practical, and higher voltages could start negatively affecting the life of the motor.
The gearboxes are composed mainly of spur gears, but they feature helical gears for the first stage for reduced noise and improved efficiency:
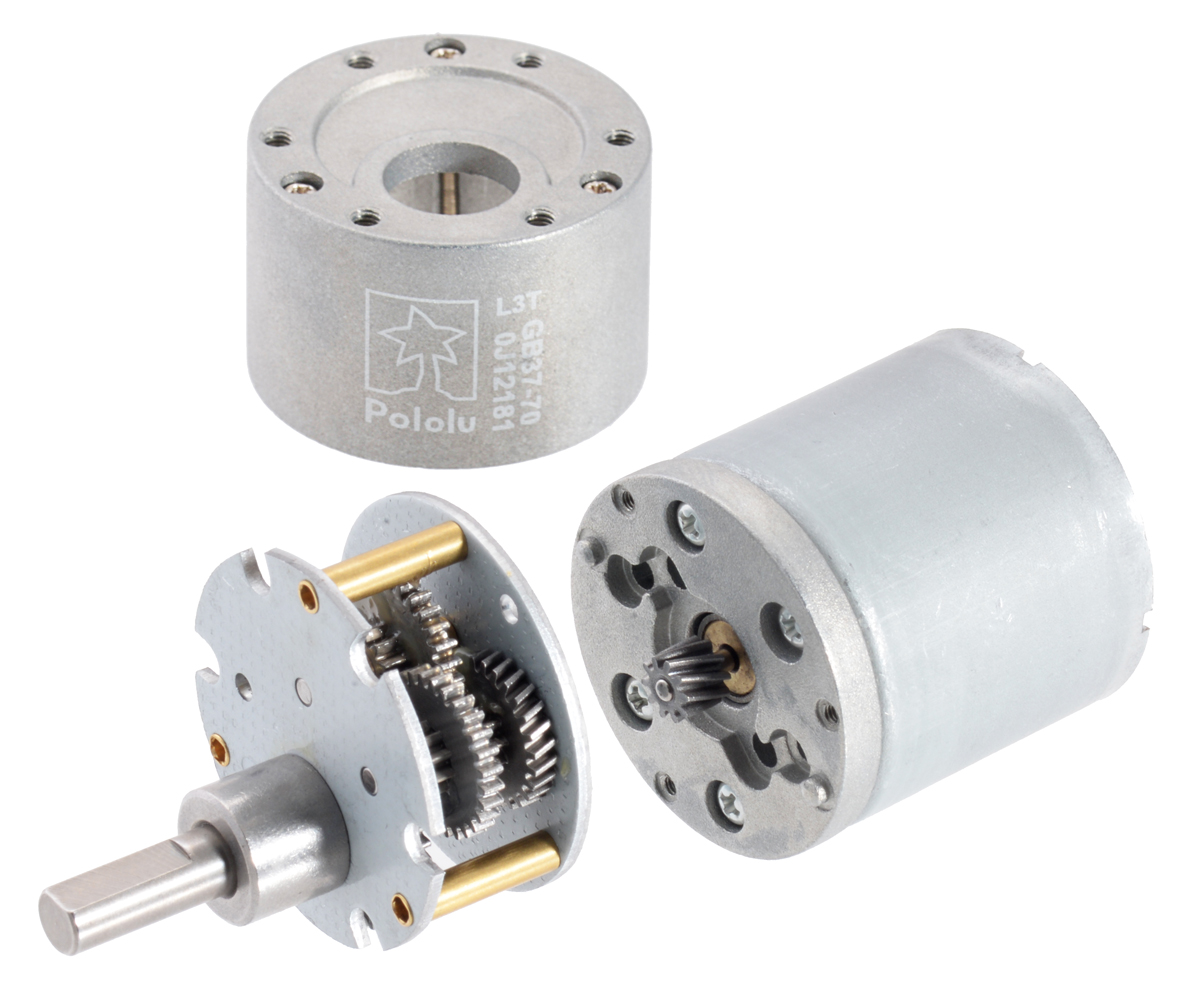 |
37D Gearmotor (Helical Pinion) with the gearbox removed showing the helical pinion gear and first mating gear. |
|---|
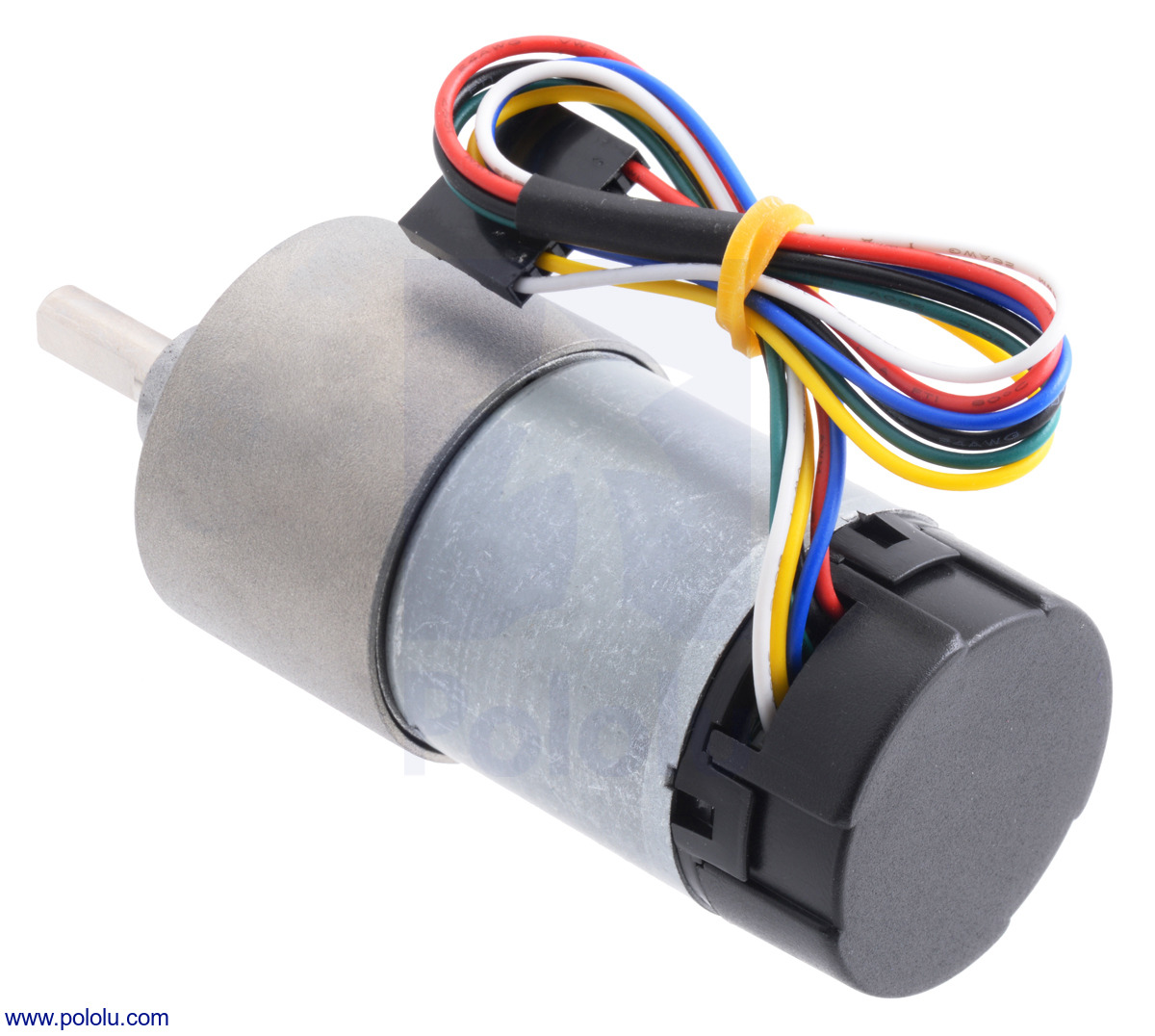
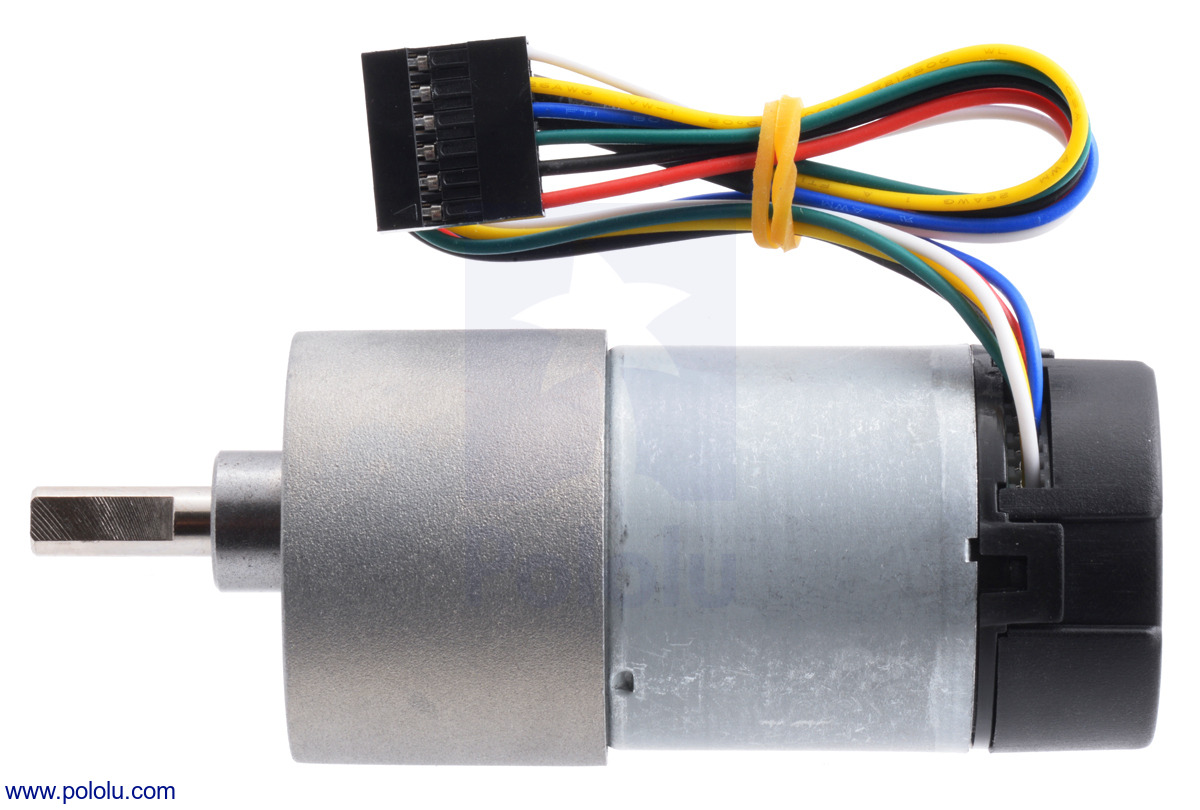
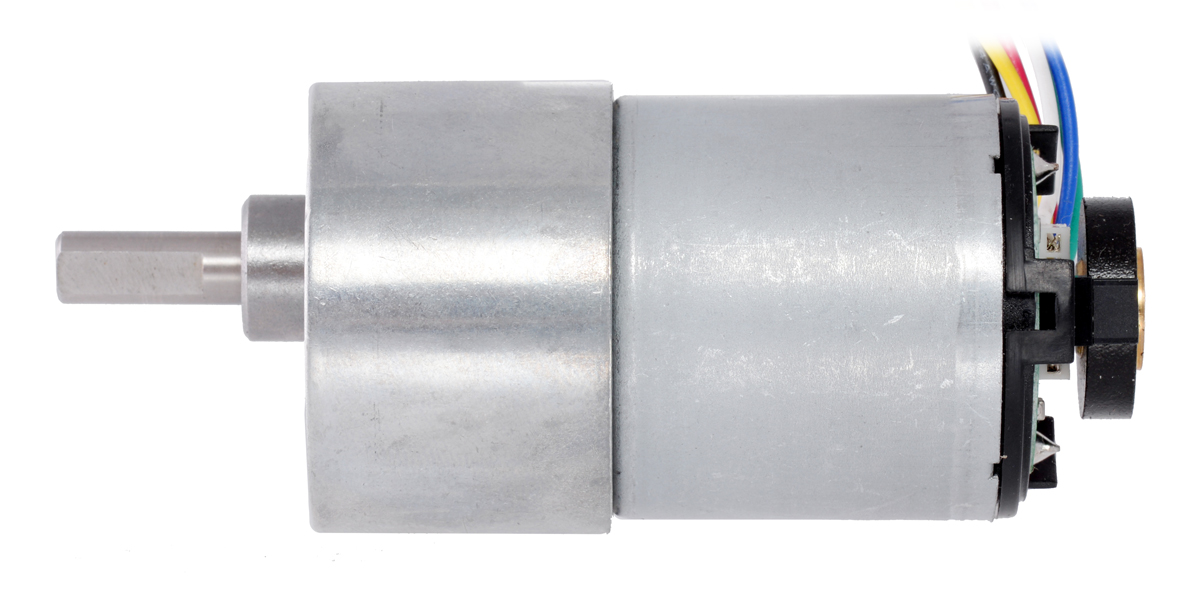
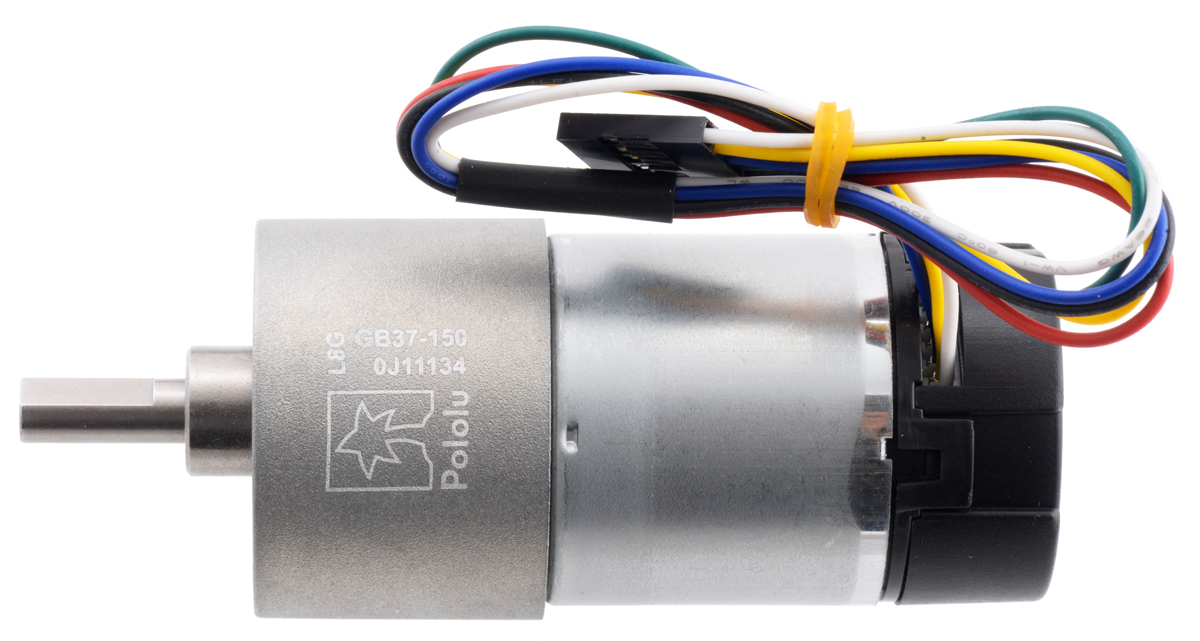
On units with encoders, the encoder portion is protected by a black plastic end cap:
|
|
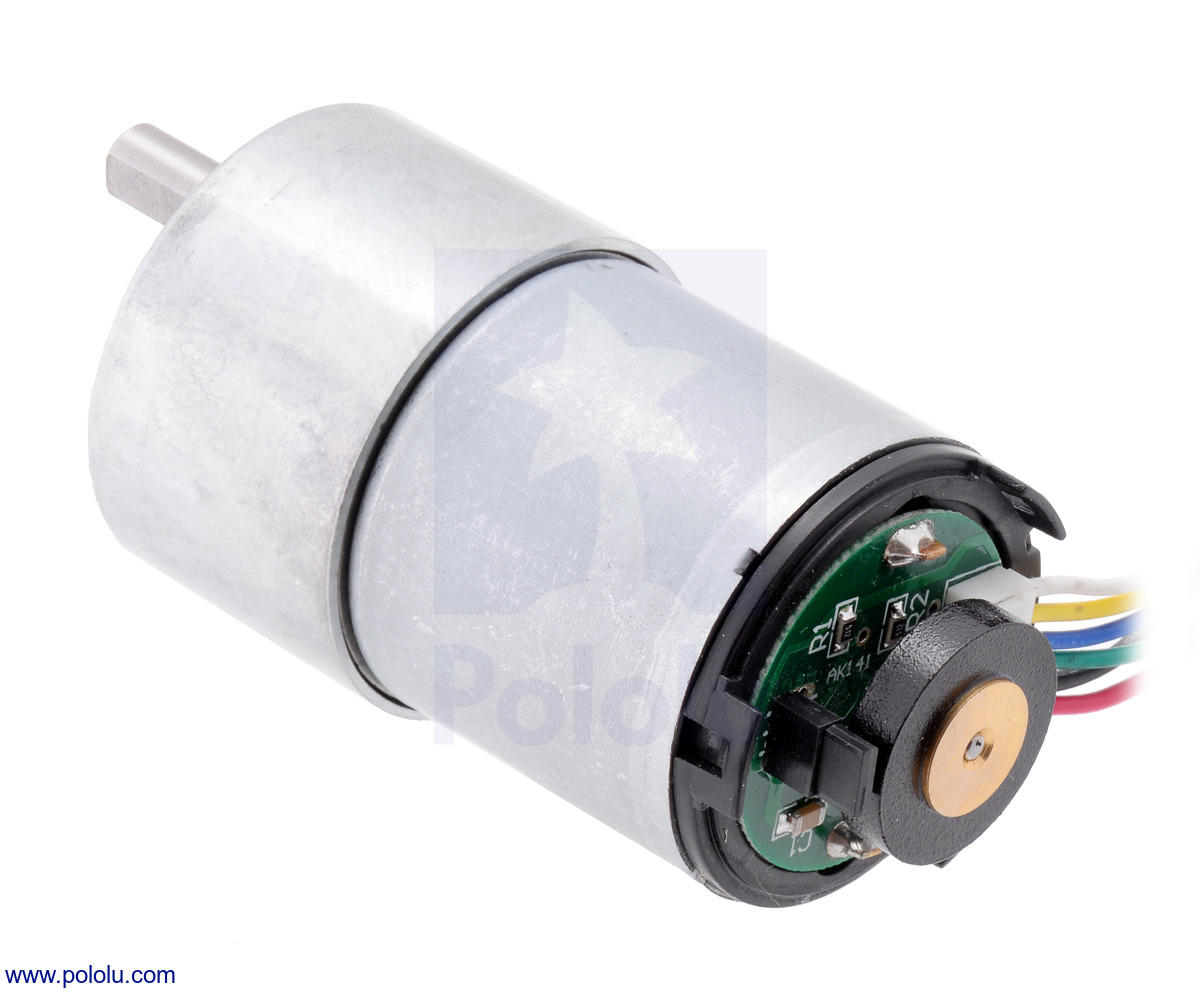
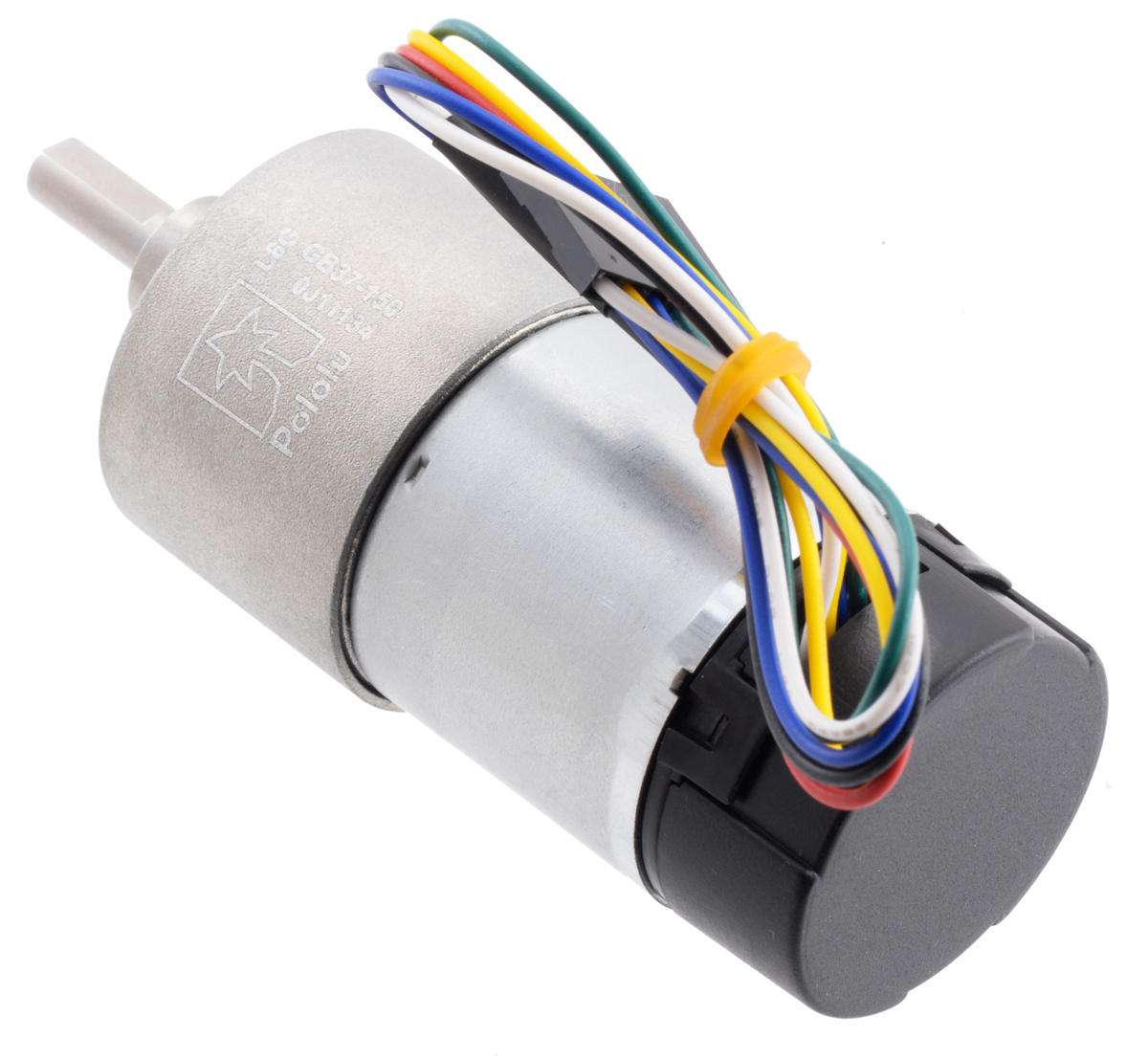
The end cap is easily removable if you need to access the encoder or want to slightly reduce the overall gearmotor size, but there is a little bit of base plastic that will remain, as shown in the pictures below:
|
|
Details for item #2828
|
|
|
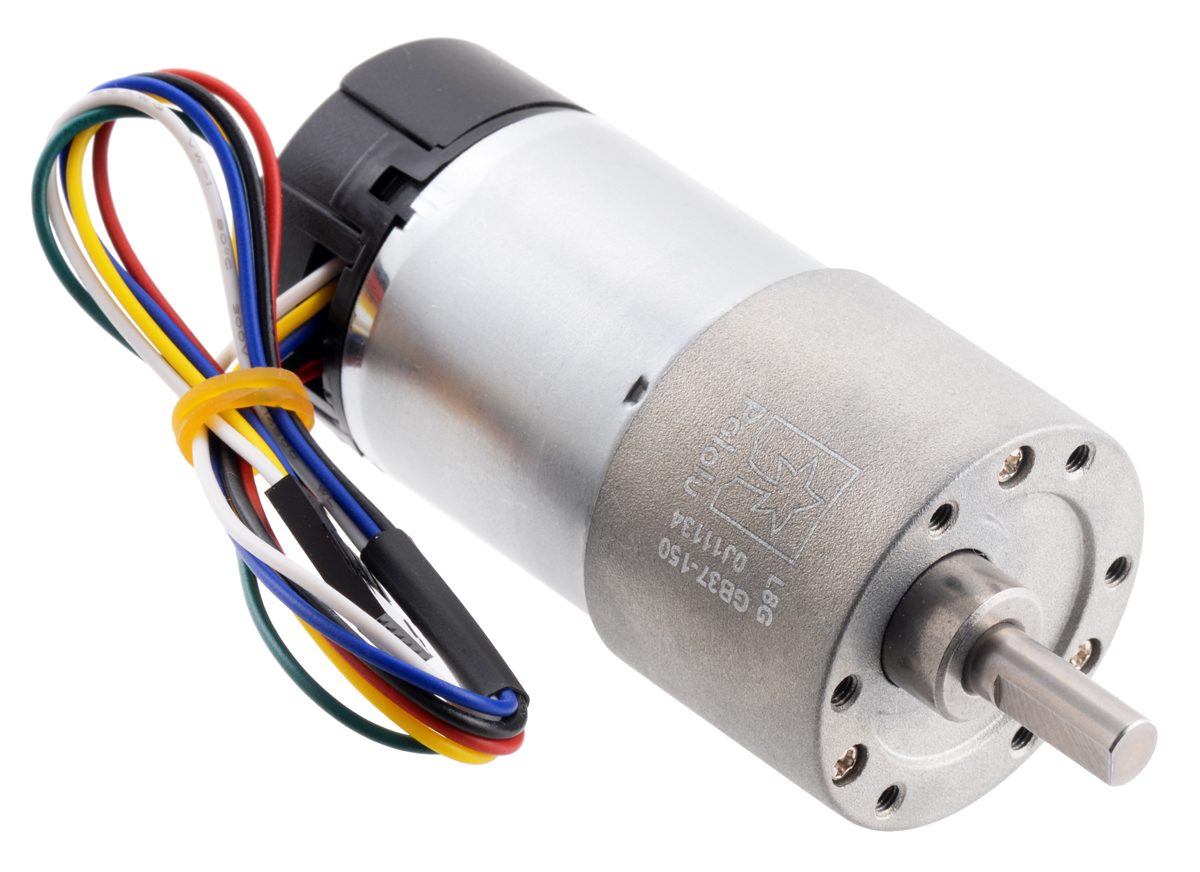
This gearmotor is a powerful 12V brushed DC motor with a 150:1 metal gearbox and an integrated quadrature encoder that provides a resolution of 64 counts per revolution of the motor shaft, which corresponds to 9600 counts per revolution of the gearbox’s output shaft. These units have a 16 mm-long, 6 mm-diameter D-shaped output shaft. This gearmotor is also available without an encoder.
Key specifications:
| voltage | no-load performance | stall extrapolation |
|---|---|---|
| 12 V | 67 RPM, 200 mA | 49 kg·cm (680 oz·in), 5.5 A |
Exact gear ratio:
Dimensions
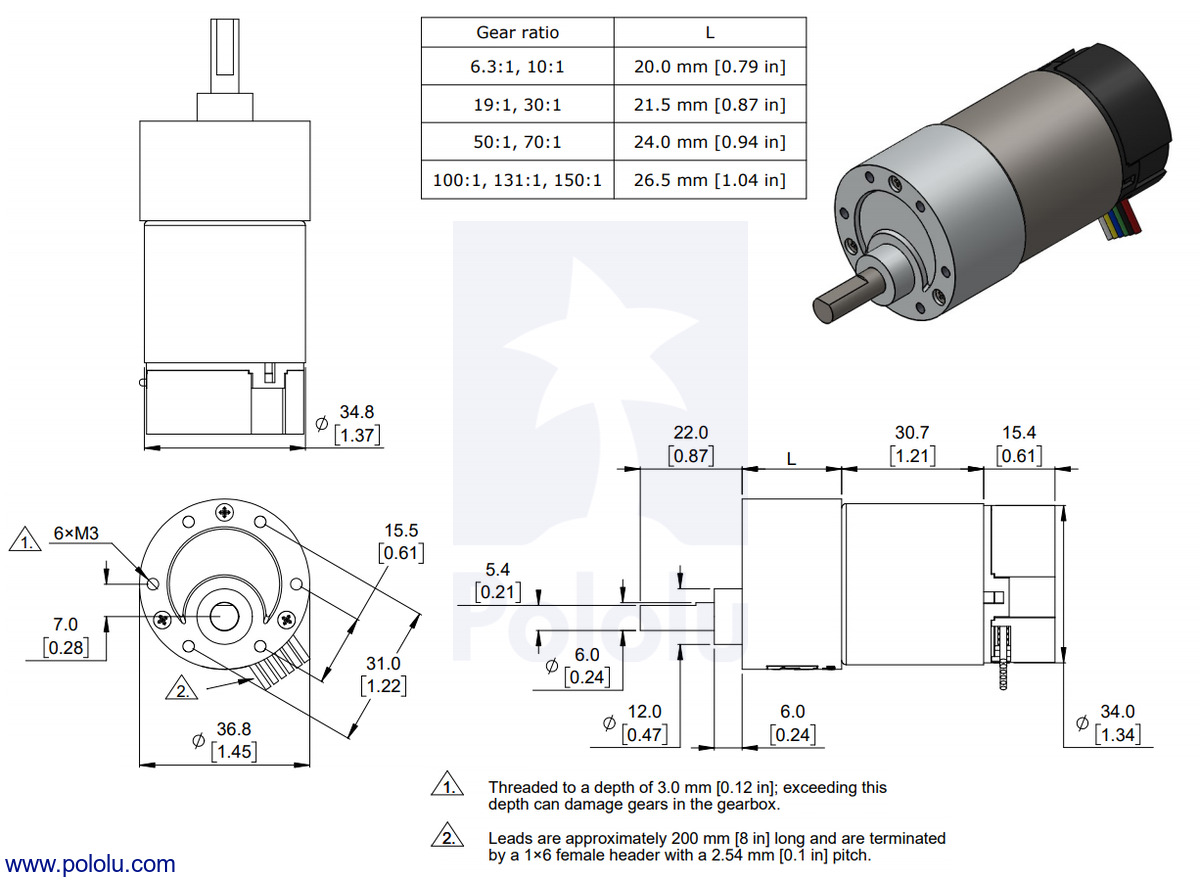 |
Dimensions of the 37D metal gearmotors with 64 CPR encoders. Units are mm over [inches]. |
|---|
This diagram is also available as a downloadable PDF (459k pdf).
Warning: Do not screw too far into the mounting holes as the screws can hit the gears. Pololu recommend screwing no more than 3mm (0.12") into the screw hole.
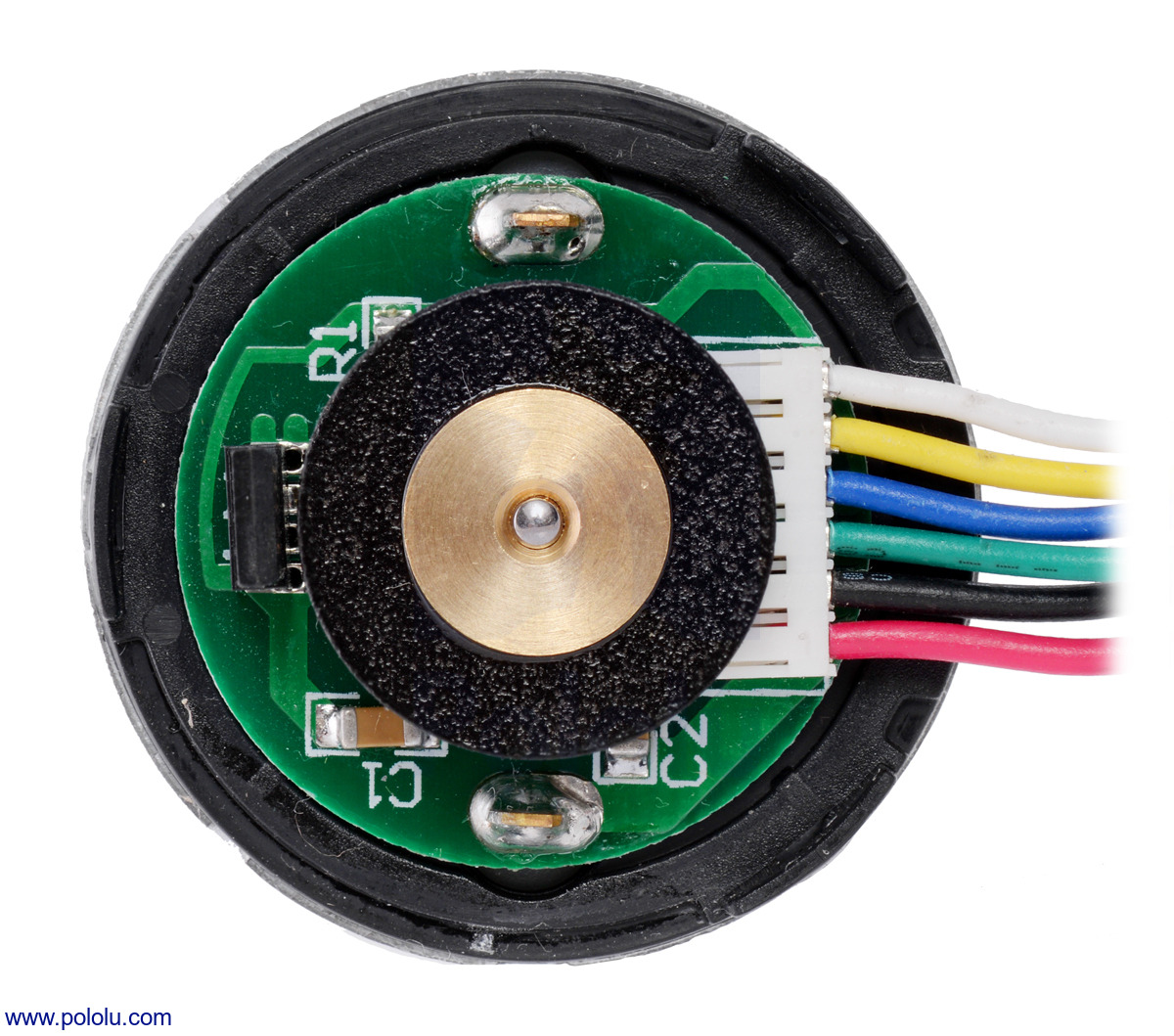 |
37D mm metal gearmotor with 64 CPR encoder (with end cap removed). |
|---|
 |
Using the Encoder
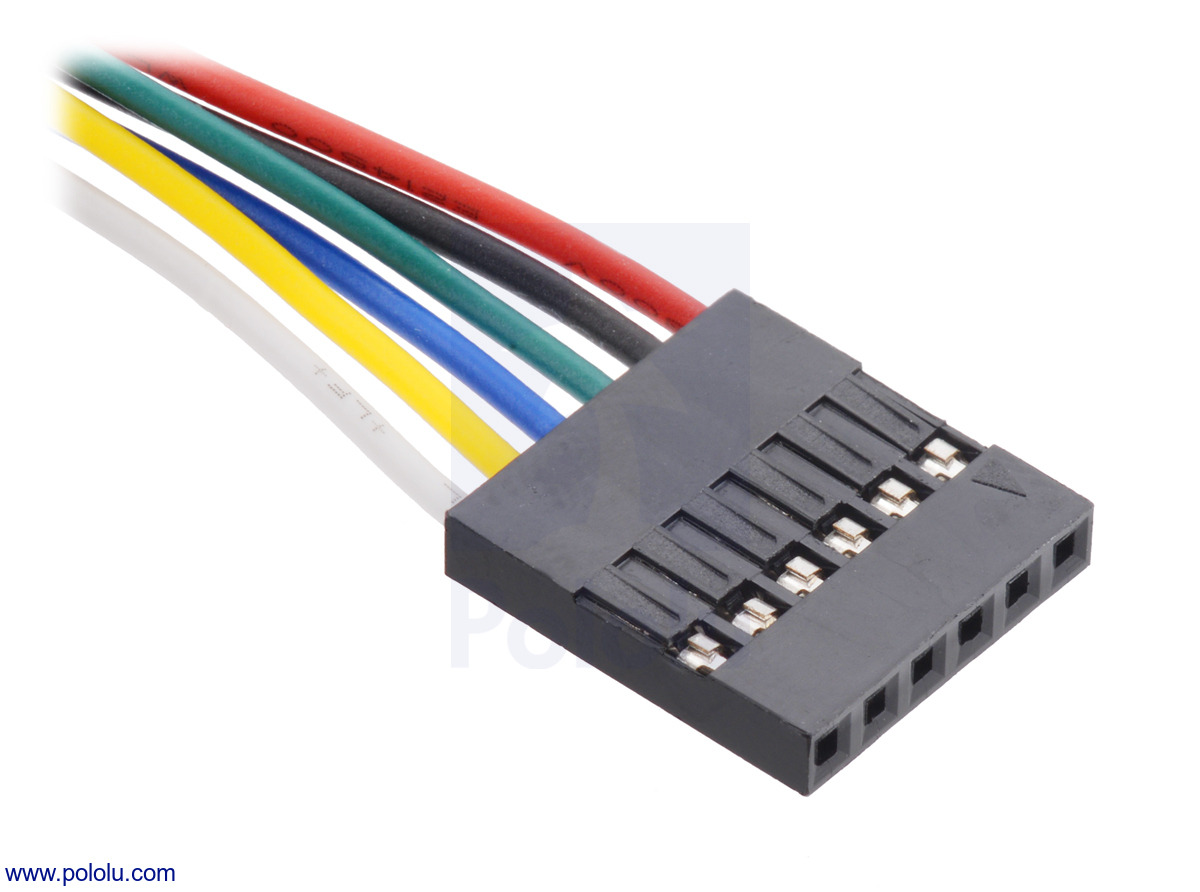
A two-channel Hall effect encoder is used to sense the rotation of a magnetic disk on a rear protrusion of the motor shaft. The quadrature encoder provides a resolution of 64 counts per revolution of the motor shaft when counting both edges of both channels. To compute the counts per revolution of the gearbox output, multiply the gear ratio by 64. The motor/encoder has six color-coded, 8" (20 cm) leads terminated by a 1×6 female header with a 0.1" pitch, as shown in the main product picture. This header works with standard 0.1" male headers and Pololu's male jumper and precrimped wires. If this header is not convenient for your application, you can pull the crimped wires out of the header or cut the header off. The following table describes the wire functions:
| Color | Function |
|---|---|
| Red | motor power (connects to one motor terminal) |
| Black | motor power (connects to the other motor terminal) |
| Green | encoder GND |
| Blue | encoder Vcc (3.5 – 20 V) |
| Yellow | encoder A output |
| White | encoder B output |
The Hall sensor requires an input voltage, Vcc, between 3.5 and 20 V and draws a maximum of 10 mA. The A and B outputs are square waves from 0 V to Vcc approximately 90° out of phase. The frequency of the transitions tells you the speed of the motor, and the order of the transitions tells you the direction. The following oscilloscope capture shows the A and B (yellow and white) encoder outputs using a 12 V motor at 12 V and a Hall sensor Vcc of 5 V:
 |
Encoder A and B outputs for 37D mm metal gearmotor with 64 CPR encoder (12V motor running at 12 V). |
|---|
By counting both the rising and falling edges of both the A and B outputs, it is possible to get 64 counts per revolution of the motor shaft. Using just a single edge of one channel results in 16 counts per revolution of the motor shaft, so the frequency of the A output in the above oscilloscope capture is 16 times the motor rotation frequency.
Gearmotor accessories
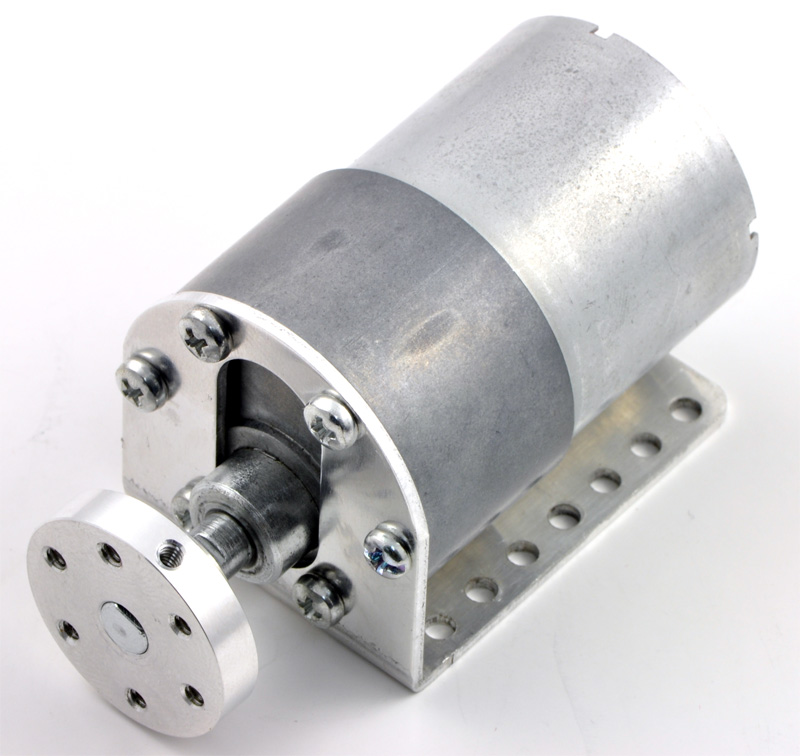
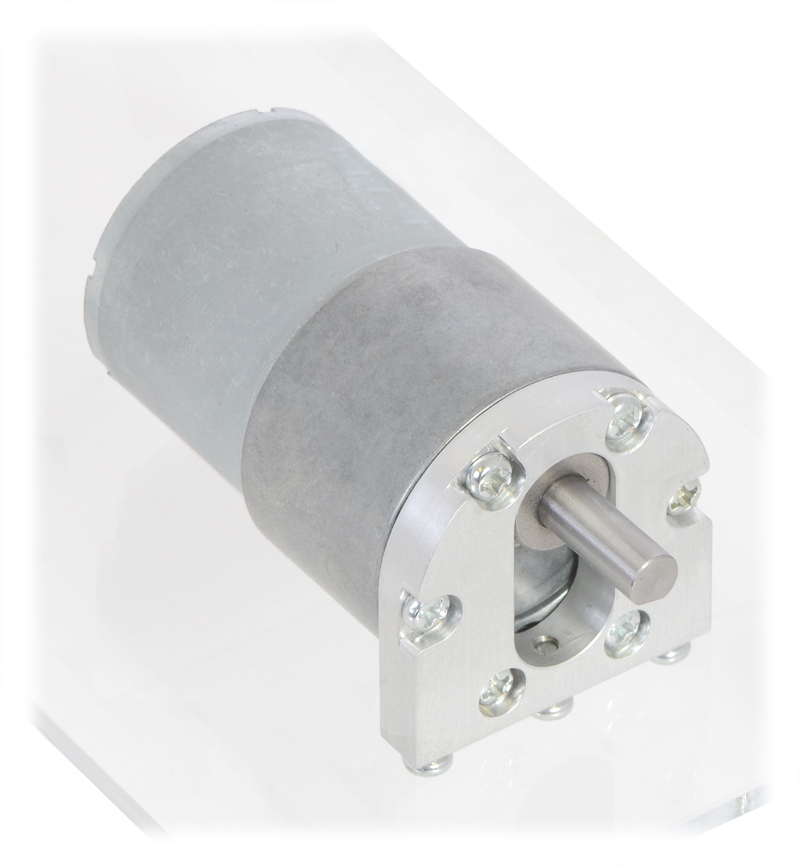
The face plate has six mounting holes evenly spaced around the outer edge threaded for M3 screws. These mounting holes form a regular hexagon and the centers of neighboring holes are 15.5 mm apart. Pololu carry two brackets for these gearmotors: a stamped aluminum L-bracket (sold in pairs) and a sturdier, tombstone-style machined aluminum bracket (sold individually):
|
|
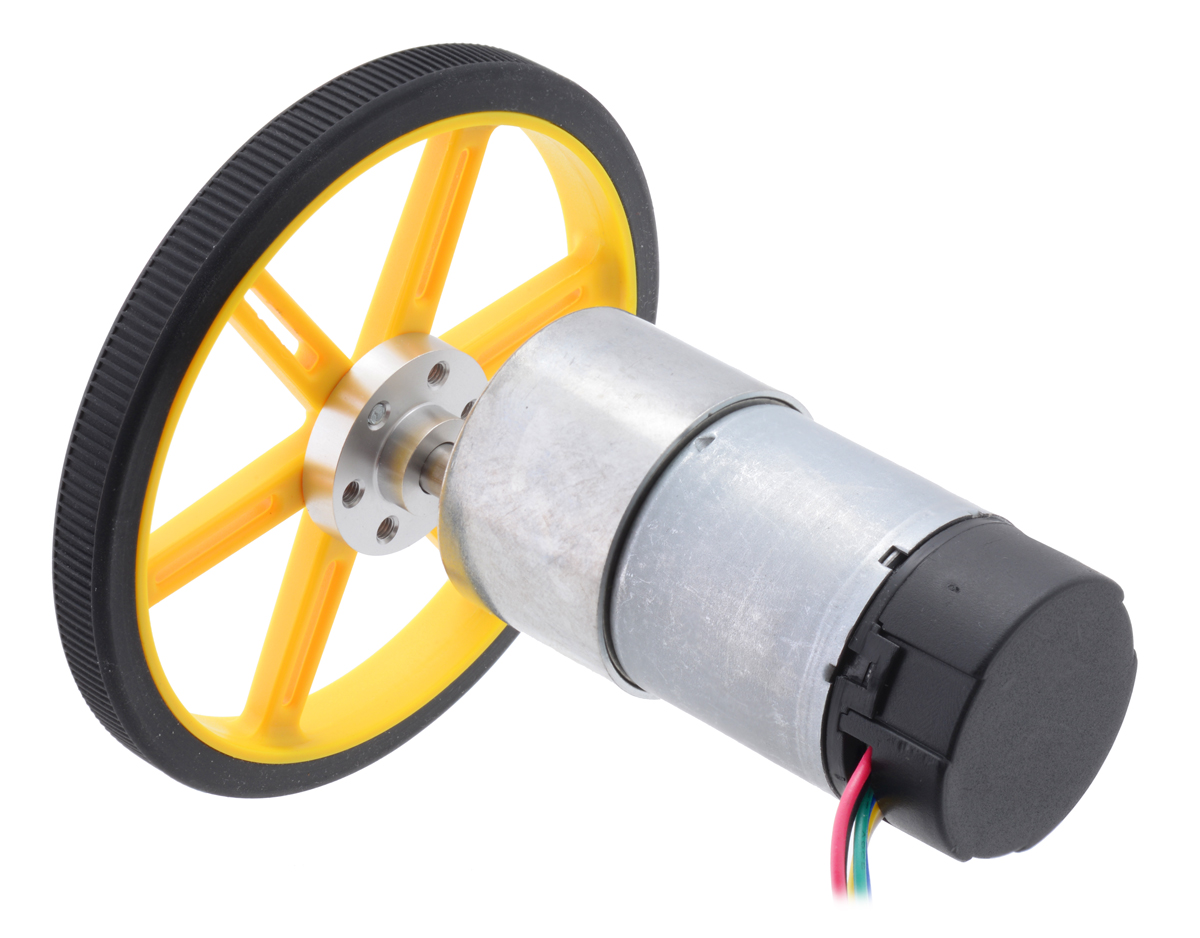
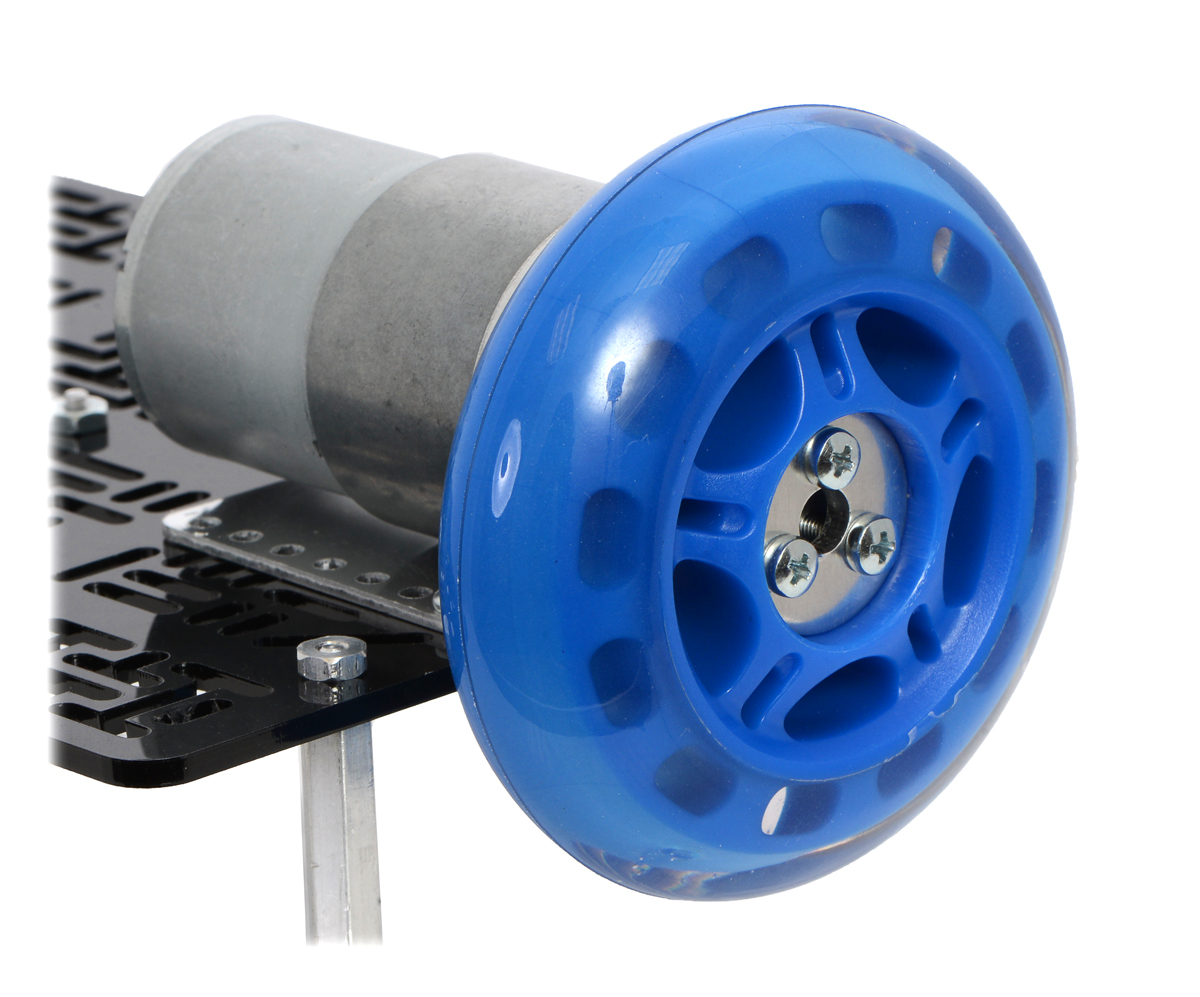
The 6 mm diameter gearbox output shaft works with the Pololu universal aluminum mounting hub for 6mm shafts, which can be used to mount Pololu's larger Pololu wheels (80mm- and 90mm-diameter) or custom wheels and mechanisms to the gearmotor’s output shaft as shown in the left picture below. Alternatively, you could use Pololu's 6mm scooter wheel adapter to mount many common scooter, skateboard, and inline skate wheels to the gearmotor’s output shaft as shown in the right picture below:
|
|
For a general-purpose hex adapter, consider Pololu's 12mm hex wheel adapter (also available in an extended version), which lets you use these motors with many common hobby RC wheels, including Dagu Wild Thumper Wheels:
 |
12mm Hex Wheel Adapter for 6mm Shaft connecting a Wild Thumper Wheel to a 37D mm Metal Gearmotor. |
|---|
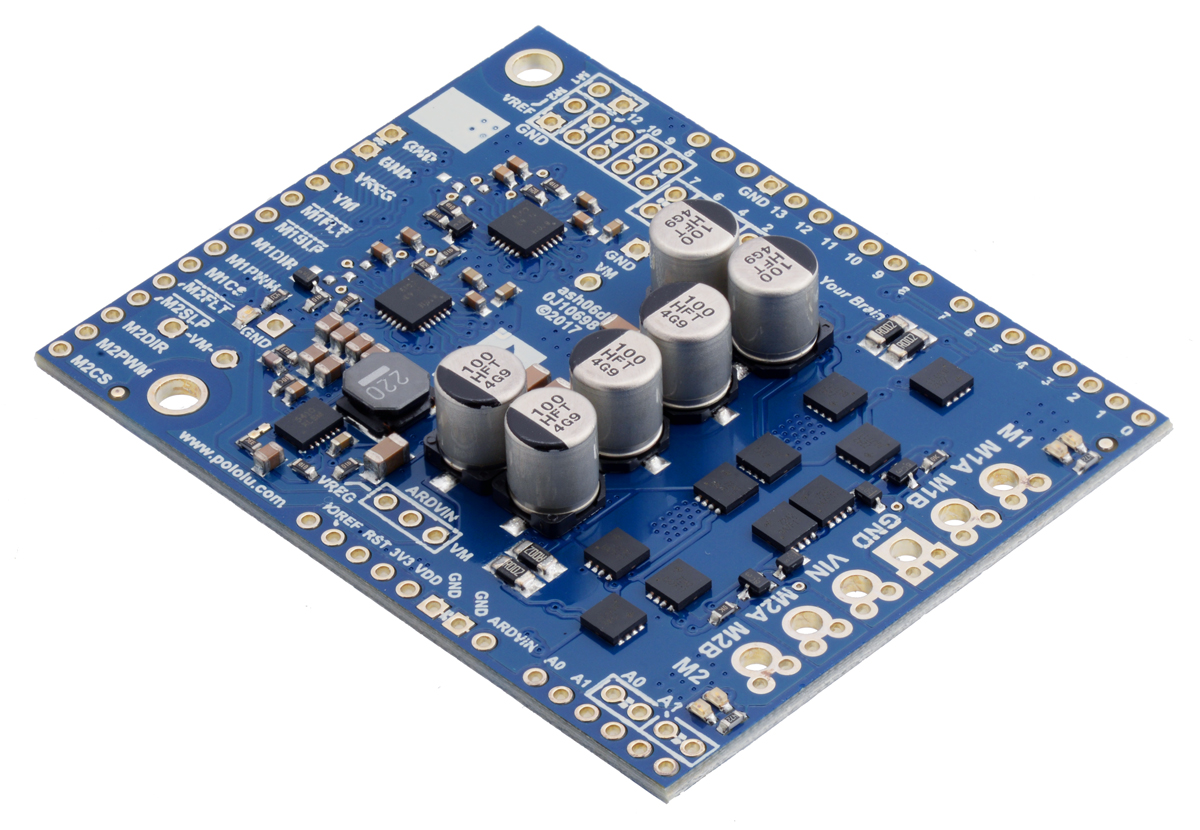
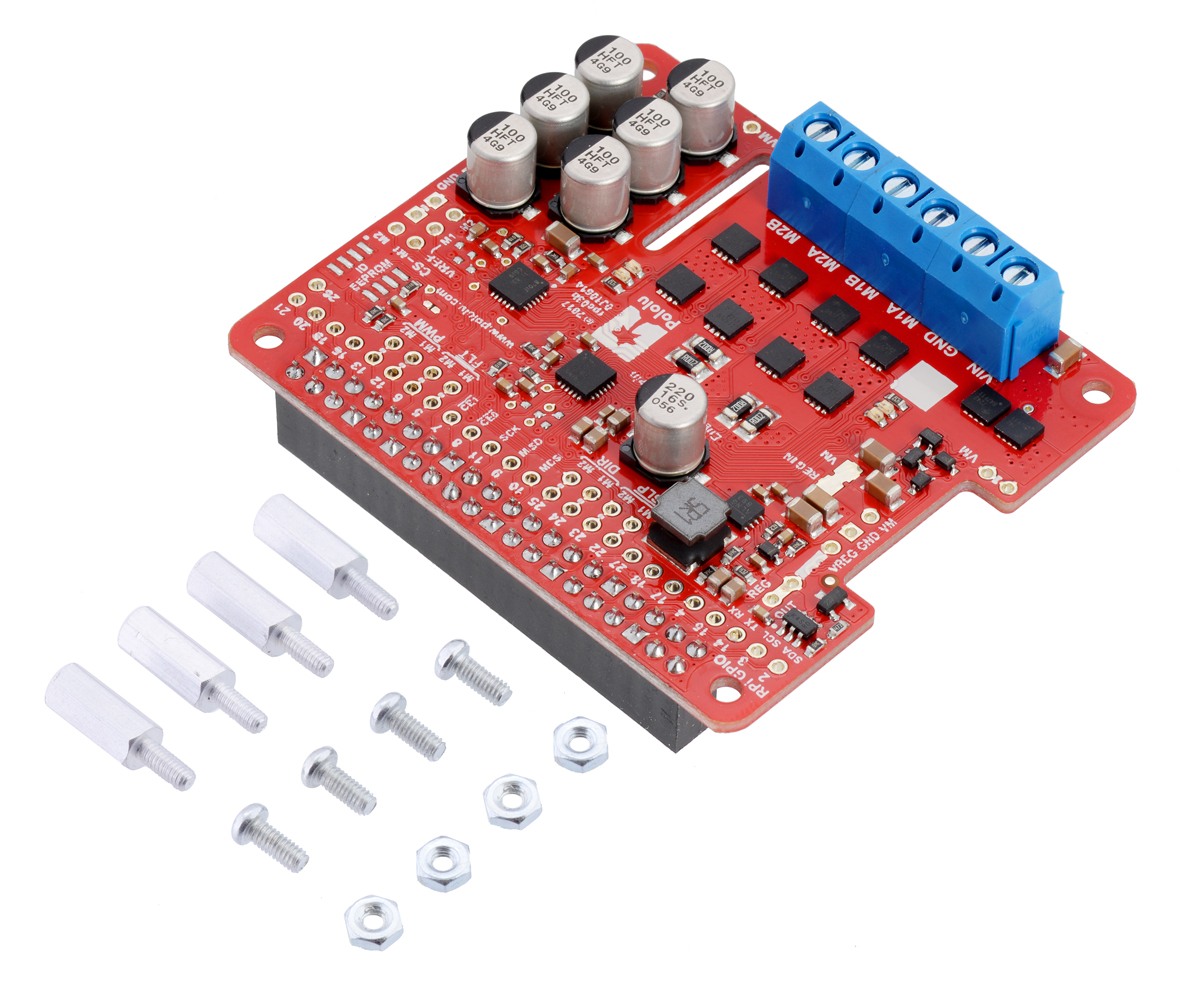
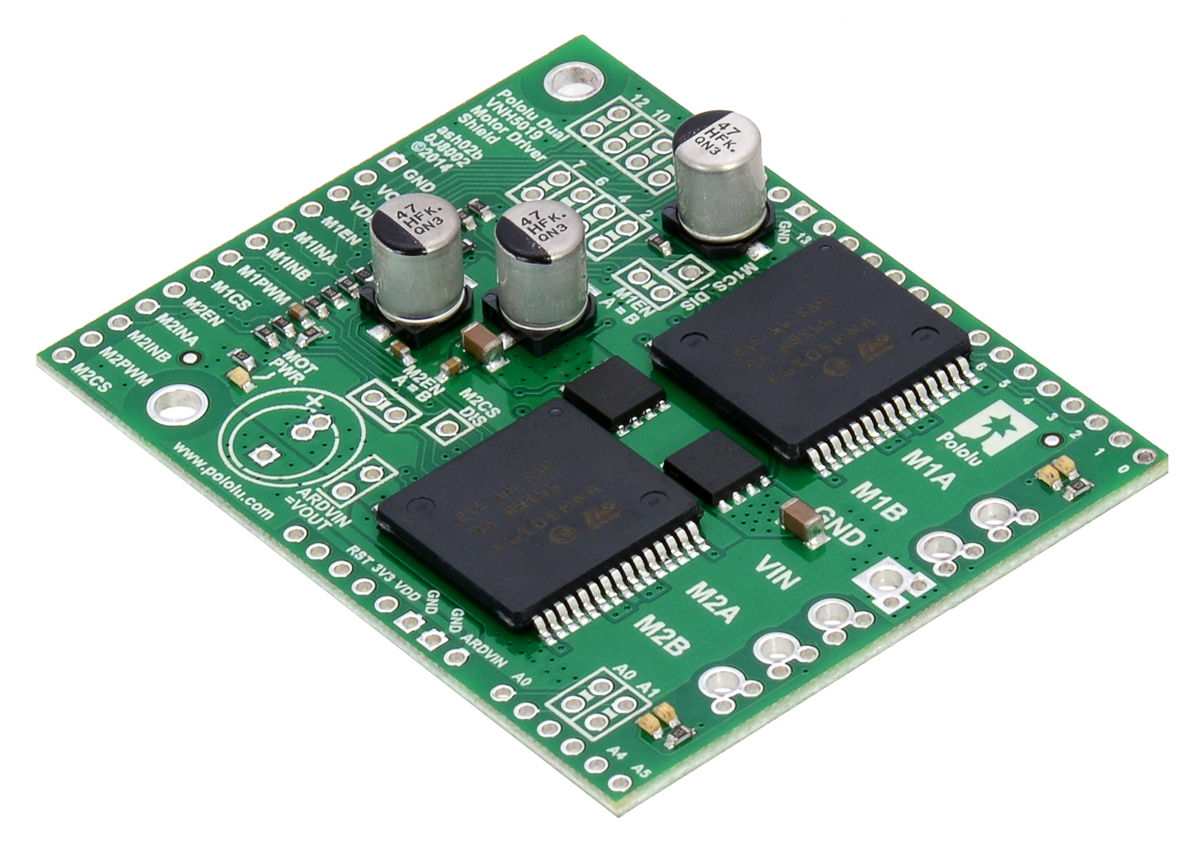
Pololu have a number of motor drivers and motor controllers that work with these 37D mm metal gearmotors. Pololu generally recommend Pololu's High-Power Motor Drivers, which are available in various power levels and versions, including some dual-channel shields for Arduino and dual-channel expansion boards for Raspberry Pi. Additionally, Pololu's VNH5019-based motor drivers, which are also available as single and dual carriers, are a good match for these gearmotors.
|
|
|
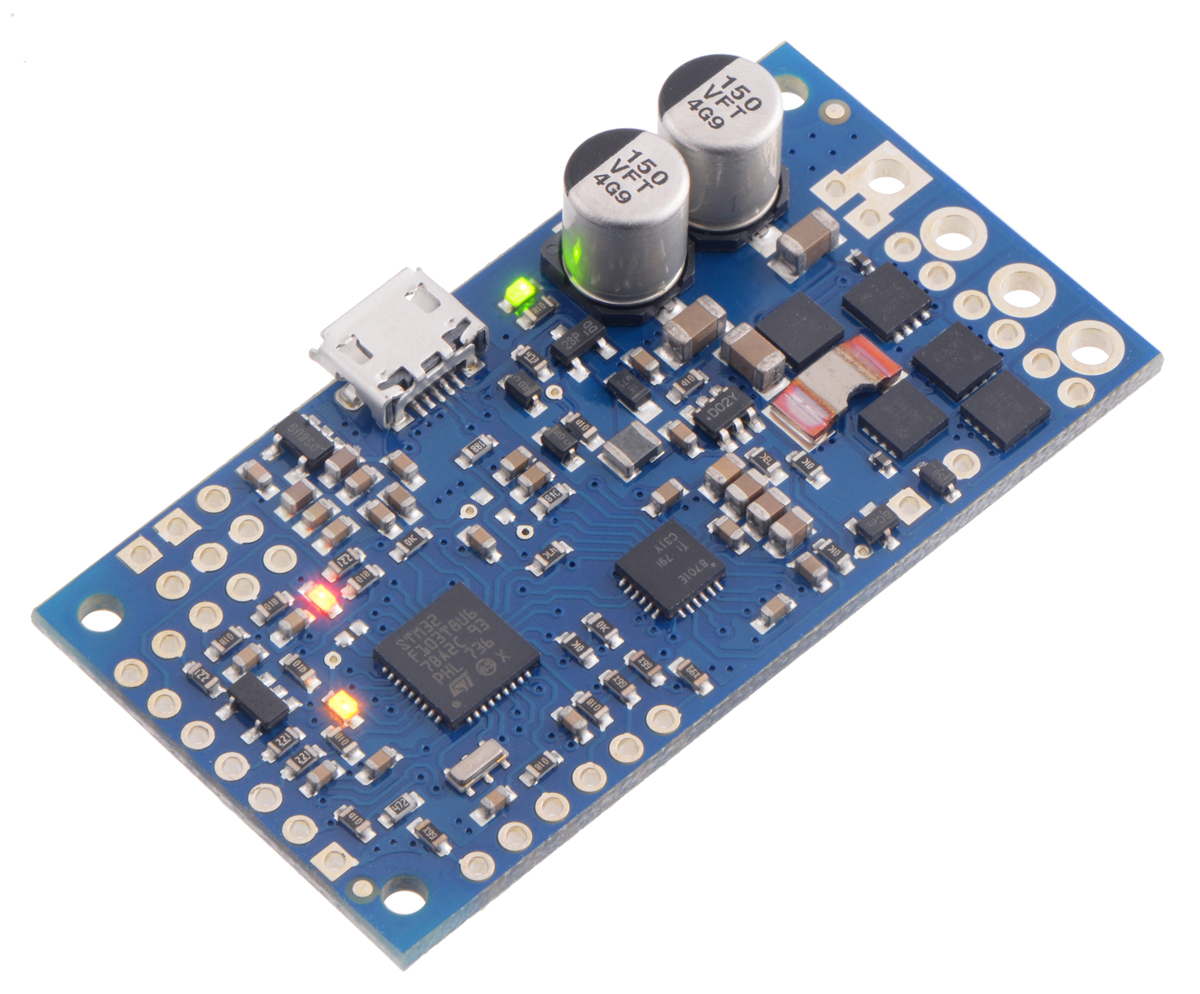
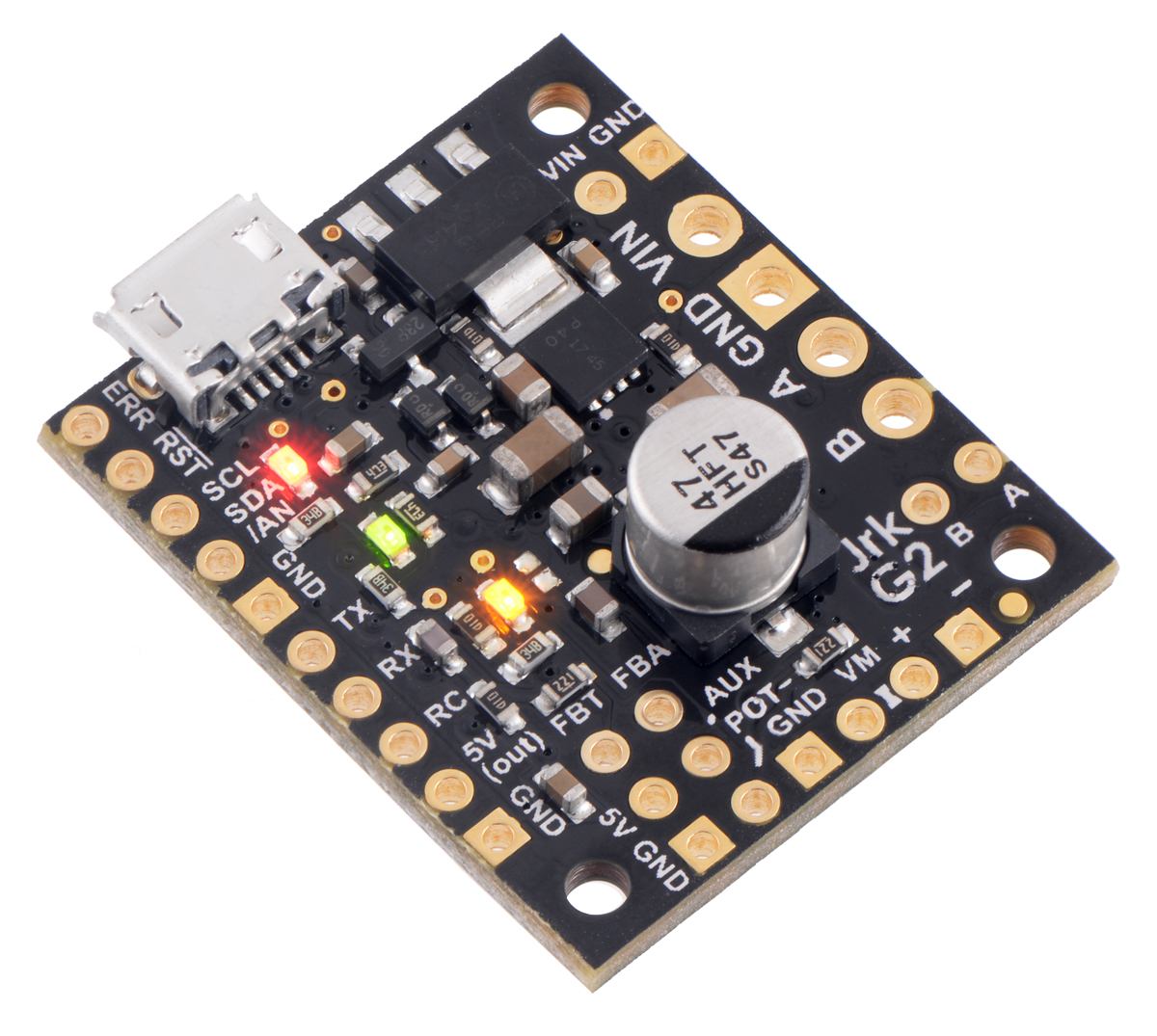
If you are looking for higher-level control interfaces, such as USB, RC, analog voltages, I²C, or TTL serial, consider Pololu's Simple Motor Controllers, Jrk motor controllers, or RoboClaw motor controllers; these controllers are available in various power levels several of which can handle these 37D mm metal gearmotors (we generally recommend a motor controller that can handle continuous currents above the stall current of your motor).
|
|
|

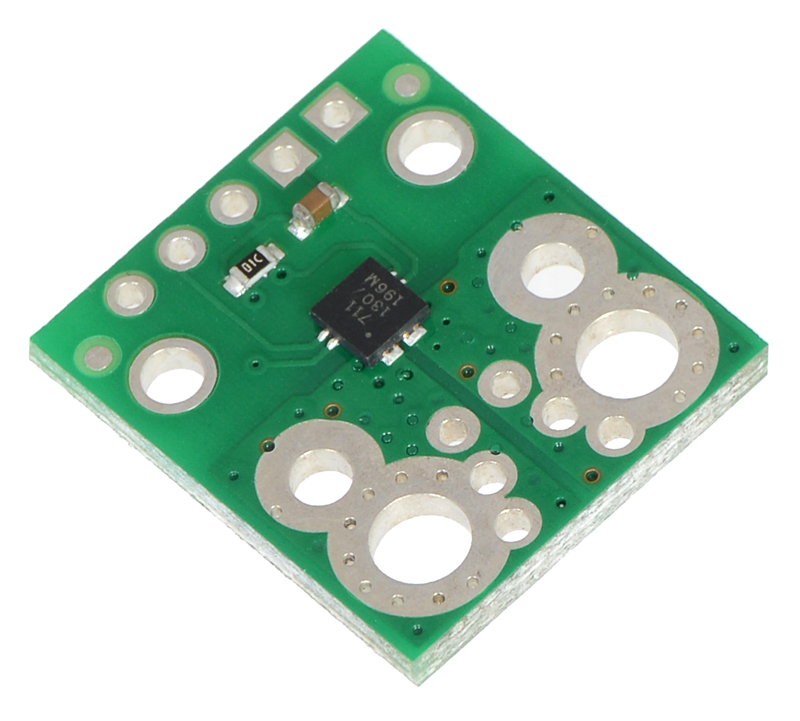
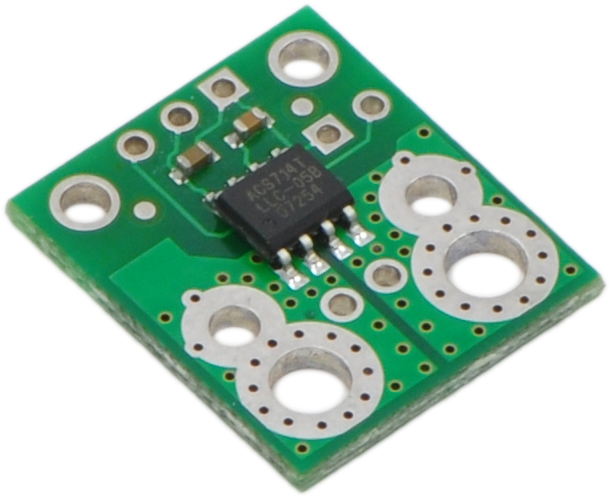
Pololu have an assortment of Hall effect-based current sensors to choose from for those who need to monitor motor current:
|
|
Selecting the Right Gearmotor
Pololu offer a wide selection of metal gearmotors that offer different combinations of speed and torque. Pololu's metal gearmotor comparison table can help you find the motor that best meets your project’s requirements.
 |
People often buy this product together with:
 | Pololu Universal Aluminum Mounting Hub for 6mm Shaft, #4-40 Holes (2-Pack) |
 | Pololu Stamped Aluminum L-Bracket Pair for 37D mm Metal Gearmotors |
 | Pololu Machined Aluminum Bracket for 37D mm Metal Gearmotors |
Dimensions
| Size: | 37D × 72.5L mm1 |
|---|---|
| Weight: | 210 g |
| Shaft diameter: | 6 mm2 |
General specifications
| Gear ratio: | 150:1 |
|---|---|
| No-load speed @ 12V: | 67 rpm |
| No-load current @ 12V: | 0.2 A |
| Stall current @ 12V: | 5.5 A3 |
| Stall torque @ 12V: | 49 kg·cm3 |
| Max output power @ 12V: | 6 W4 |
| No-load speed @ 6V: | 33 rpm5 |
| No-load current @ 6V: | 0.15 A5 |
| Stall current @ 6V: | 3.0 A5 |
| Stall torque @ 6V: | 30 kg·cm5 |
| Motor type: | 12V |
Performance at maximum efficiency
| Max efficiency @ 12V: | 44 % |
|---|---|
| Speed at max efficiency: | 58 rpm |
| Torque at max efficiency: | 6.5 kg·cm |
| Current at max efficiency: | 0.72 A |
| Output power at max efficiency: | 3.8 W |
General specifications
| Lead length: | 20 cm6 |
|---|---|
| Encoders?: | Y |
| Encoder resolution: | 64 CPR |
Notes:
- 1
- Length measurement is from gearbox face plate to back of encoder cap (it does not include the output shaft). See dimension diagram for details.
- 2
- D shaft.
- 3
- Stalling is likely to damage the gearmotor. Stall parameters come from a theoretical extrapolation of performance at loads far from stall. As the motor heats up, as happens as it approaches an actual stall, the stall torque and current decrease.
- 4
- This is the output power at the maximum recommended operating load of 10 kg·cm; higher power might be achievable for brief durations at higher loads (see performance graphs in the datasheet).
- 5
- This motor will run at 6 V but is intended for operation at 12 V.
- 6
- May vary by a few centimeters.
File downloads
-
Dimension diagrams of the Pololu 37D mm Metal Gearmotors (459k pdf)
-
3D models of 37D mm gearmotors (7MB zip)
This file contains 3D models (in the step file format) of the 37D mm gearmotors with and without encoders.
Recommended links
-
MATLAB script to plot motor performance curves for Pololu brushed DC gearmotors
This MATLAB script, written by Ali Asgher Mansoor Habiby, plots speed, power, current draw, and efficiency as they vary with torque when you input the gearmotor specifications. It also prints the resistance of the motor, and the current draw and torque at which maximum efficiency and maximum power occur.
Exact shipping can be calculated on the view cart page (no login required).
Products that weigh more than 0.5 KG may cost more than what's shown (for example, test equipment, machines, >500mL liquids, etc).
We deliver Australia-wide with these options (depends on the final destination - you can get a quote on the view cart page):
- $3+ for Stamped Mail (typically 10+ business days, not tracked, only available on selected small items)
- $7+ for Standard Post (typically 6+ business days, tracked)
- $11+ for Express Post (typically 2+ business days, tracked)
- Pickup - Free! Only available to customers who live in the Newcastle region (must order online and only pickup after we email to notify you the order is ready). Orders placed after 2PM may not be ready until the following business day.
Non-metro addresses in WA, NT, SA & TAS can take 2+ days in addition to the above information.
Some batteries (such as LiPo) can't be shipped by Air. During checkout, Express Post and International Methods will not be an option if you have that type of battery in your shopping cart.
International Orders - the following rates are for New Zealand and will vary for other countries:
- $12+ for Pack and Track (3+ days, tracked)
- $16+ for Express International (2-5 days, tracked)
If you order lots of gear, the postage amount will increase based on the weight of your order.
Our physical address (here's a PDF which includes other key business details):
40 Aruma Place
Cardiff
NSW, 2285
Australia
Take a look at our customer service page if you have other questions such as "do we do purchase orders" (yes!) or "are prices GST inclusive" (yes they are!). We're here to help - get in touch with us to talk shop.
Have a product question? We're here to help!
 Crystal Oscillator - 20 MhzSKU: CE05230 Brand: Core ElectronicsGood stability and far more accurate than MCU internal oscillators.
Crystal Oscillator - 20 MhzSKU: CE05230 Brand: Core ElectronicsGood stability and far more accurate than MCU internal oscillators.-
-
-




- Pololu Machined Aluminum Bracket for 37D mm Metal GearmotorsSKU: POLOLU-1995 Brand: PololuThis machined aluminum gearmotor bracket lets you securely mount Pololu’s 37D ...
- Pololu 5V, 1A Step-Down Voltage Regulator D24V10F5SKU: POLOLU-2831 Brand: PololuThe compact (0.5″ × 0.7″) D24V10F5 synchronous buck voltage regulator takes ...
- Motoron M2S18v18 Dual High-Power Motor Controller Shield for Arduino (No Connectors)SKU: POLOLU-5038 Brand: PololuThe Motoron M2S18v18 Dual High-Power Motor Controller Shield for Arduino makes i ...
- Micro Limit Switch (Roller Lever) - 2 PackSKU: GB-3103-0001-0001 Brand: goBildaThis switch has a roller on the lever which minimizes friction and creates a smo ...




Videos
View AllGuides

Servos, Steppers or Solenoids? | Choosing an Actuator to Move Your Project

How To Control A Motor with the Raspberry Pi

The Maker Revolution

Motor Drivers vs. Motor Controllers
Projects

DIY Pi Buggy

Makers love reviews as much as you do, please follow this link to review the products you have purchased.
Product Comments