


Optical Encoder Pair Kit for Micro Metal Gearmotors, 3.3V
In stock, ships same business day if ordered before 2PM
Fastest delivery: Tomorrow*
Disclaimer:
For next-day delivery, the shipping address must
be in the AusPost next-day network, eParcel Express must be selected, and the order must be placed
before 2PM AEST Mon-Thurs excluding NSW Public Holidays. Orders may be delayed due to AusPost
pickup timings and order verifications. eParcel Express is typically a 1-day service within the
AusPost next-day network, though it is sometimes 2+ days.
Quantity Discounts:
- 10+ $20.42 (exc GST)
- 25+ $19.78 (exc GST)
Note: Pololu strongly recommend Pololu's newer magnetic encoder pair kits for micro metal gearmotors over these optical encoders. The magnetic encoders are less susceptible to ambient interference, and they feature cleaner signals with built-in hysteresis, so Pololu can be connected directly to a microcontroller or other digital circuit. Conversely, since the optical encoder outputs are direct phototransistor outputs, some signal conditioning is often necessary between the sensor and a digital system processing the signals.
Also, this encoder is not compatible with Pololu's HPCB micro metal gearmotors (the HPCB motor terminals are too large to fit the corresponding PCB holes), but it is compatible with the LP, MP, and HP versions of Pololu's micro metal gearmotors.
This set includes sensor boards and reflective wheels to add quadrature encoding to two micro metal gearmotors with extended back shafts (motors are not included with this kit). 3-tooth and 5-tooth encoder wheels are included to provide options of 12 counts per revolution and 20 counts per revolution of the motor shaft (to compute the encoder counts per revolution of the gearbox output, multiply by the gear ratio).
Note: This sensor system is intended for relatively advanced users comfortable with the physical encoder installation and with using the resulting signals. It only works with micro metal gearmotors that have extended back shafts.
|
|
Pinout and installation
The encoder board is designed to be soldered directly to the back of the motor, with the back shaft of the motor protruding through the hole in the middle of the circuit board. The better aligned the board, the better the output signal quality will be. One way to achieve good alignment is to tack down the board to one motor pin and to solder the other pin only when the board is well aligned. Be careful to avoid prolonged heating of the motor pins, which could deform the plastic end cap of the motor or the motor brushes. Once the board is soldered down to the two terminals, the motor leads are connected to the M1 and M2 pads along the edge of the board, along with the power for the sensors and the two quadrature outputs:
|
|


The edge connections are on a 2 mm pitch. The board can be soldered perpendicularly to another PCB, to a 2 mm connector, or to individual wires as shown here:
 |
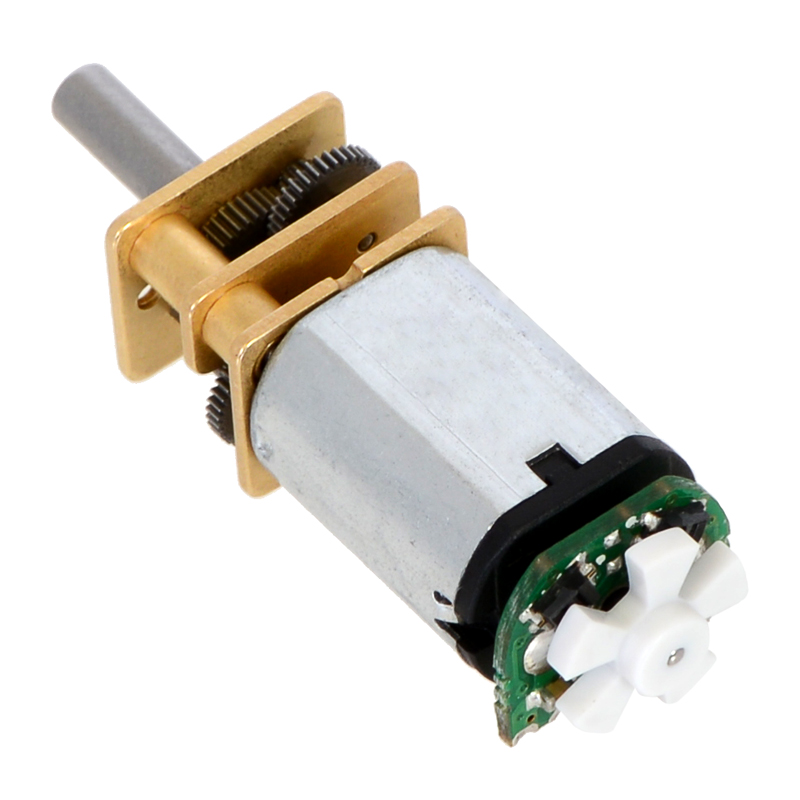
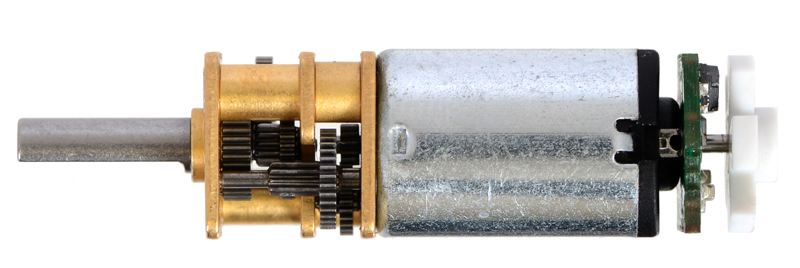
Example of an installed Micro Metal Gearmotor reflective optical encoder. |
|---|
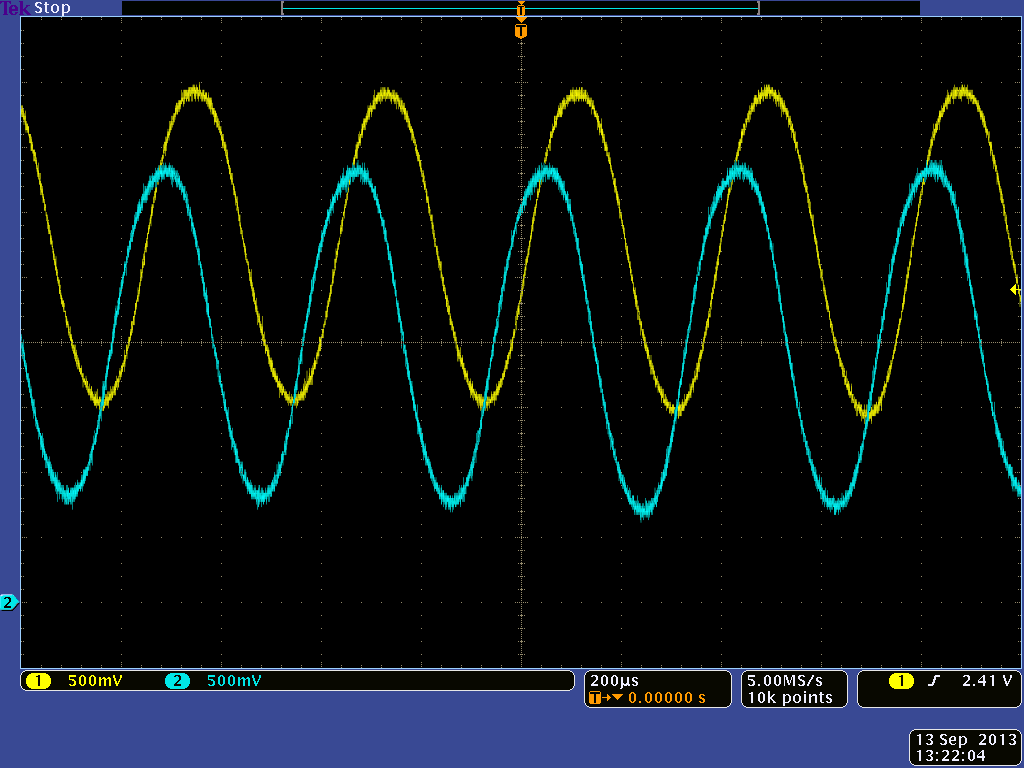
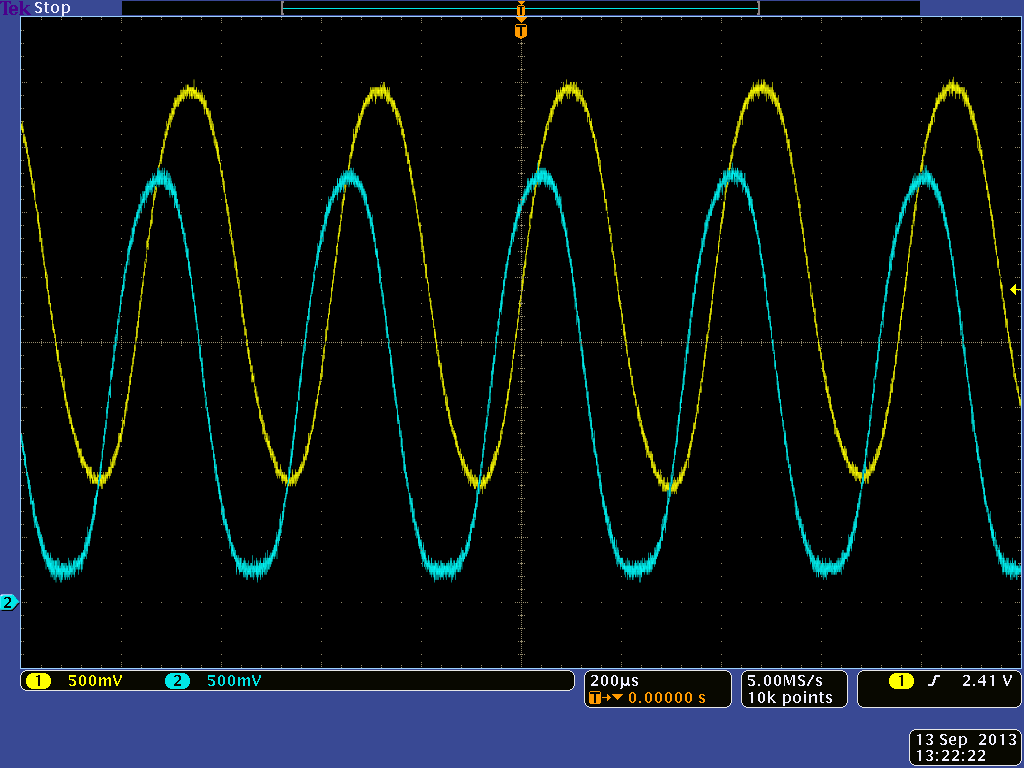
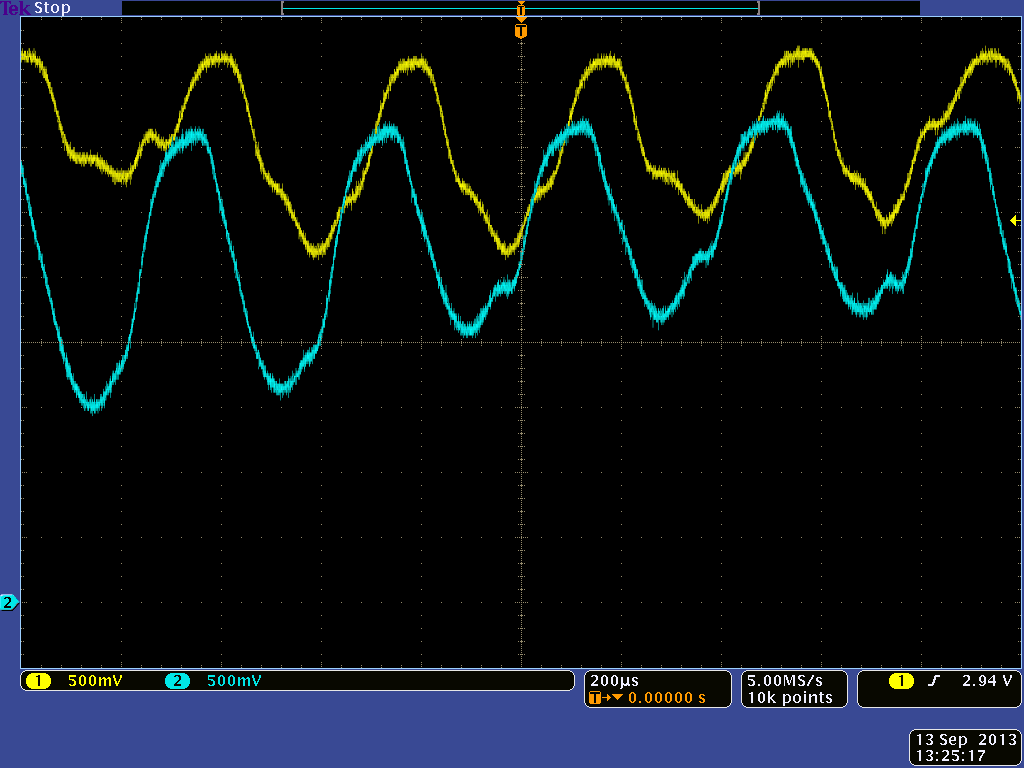
Once the board is soldered to the motor, the plastic encoder wheel can be pushed onto the motor shaft. The encoder wheel should be pushed on far enough that the gap between the wheel and sensors is approximately 0.5 mm. One way to get consistent gaps is to use a few sheets of paper or a business card as a shim when installing the encoder wheel. The best way to confirm optimal placement of the encoder wheel is to look at the signal with an oscilloscope. The following sequence of screen captures show the output for a 5-tooth wheel spinning at approximately 30,000 RPM as the wheel is pushed closer and closer to the sensors.
|
|
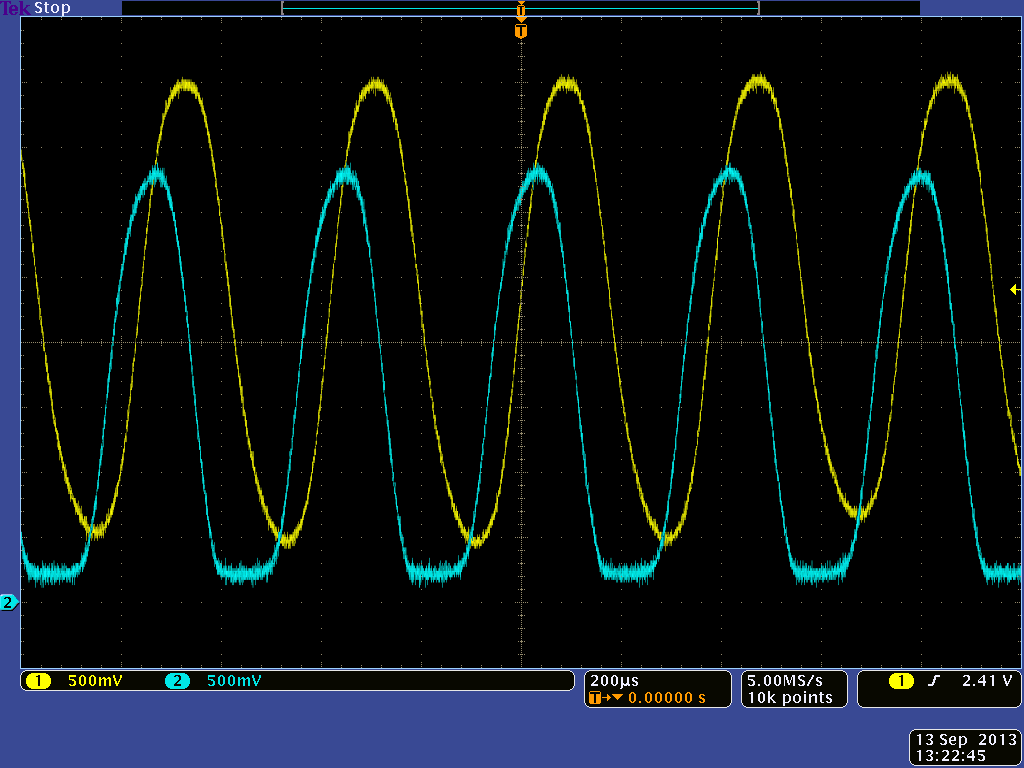 |
5V encoder version, motor approx. 30k RPM: 5-tooth wheel at optimal distance from sensors. |
|---|
|
|

The center oscilloscope capture above shows what the signal outputs look like with the wheel mounted at an optimal distance from the sensors. Note that even in this optimal case, the signals from the two channels are different due to inherent variations in the two reflectance sensors, but both signals are 90° out of phase and both span a large voltage range.
With the appropriate signal conditioning (e.g. comparators with hysteresis), all of the outputs, except perhaps for the last case, would still yield reliable position counts. The outputs also tend to improve at lower speeds and with the 3-tooth wheel.
5V and 3.3V versions
The encoder boards are available in two versions that are optimized for operation at 5.0 V and 3.3 V. The only difference is in the electrical configuration of the IR LEDs in the reflectance sensors:
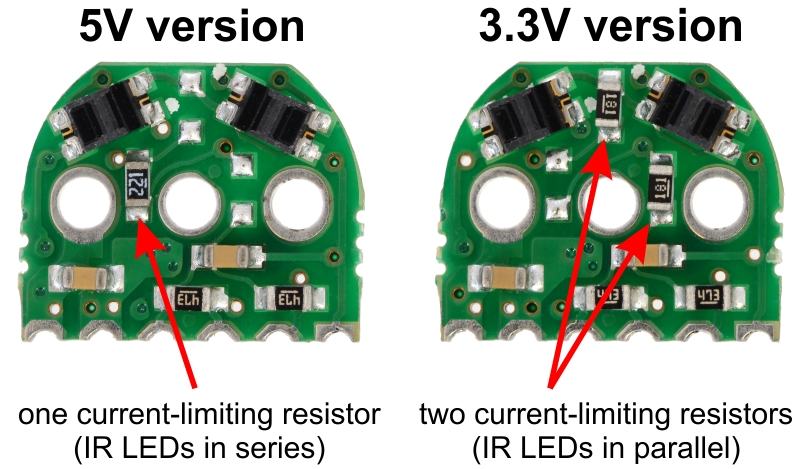 |
The 5 V version with LEDs in series draws approximately 12 mA; the 3.3 V version with LEDs in parallel draws approximately 24 mA.
 |
Schematic diagram for the Micro Metal Gearmotor reflective optical encoder. |
|---|
This schematic is also available as a downloadable pdf (145k pdf).
People often buy this product together with:
 | Pololu Micro Metal Gearmotor Bracket Extended Pair |
 | 100:1 Micro Metal Gearmotor HP 6V with Extended Motor Shaft |
| 298:1 Micro Metal Gearmotor HP 6V with Extended Motor Shaft |
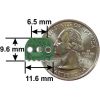
Dimensions
| Size: | 9.6 mm × 11.6 mm |
|---|---|
| Weight: | 0.7 g1 |
General specifications
| Voltage: | 3.3 V |
|---|---|
| Average input current: | 24 mA |
Notes:
File downloads
-
Optical encoder for micro metal gearmotor schematic diagram (145k pdf)
Printable schematic diagram for the optical encoder for micro metal gearmotor.
-
Datasheet for the Sharp GP2S60 compact reflective photointerrupter (164k pdf)
Datasheet for the sensor used on the QTR-3RC and QTR-3A Reflectance Sensor Arrays, the Zumo 32U4 robot front sensor array, and the Optical Encoders for micro metal gearmotors.
-
Optical Encoder for Micro Metal Gearmotors drill guide (30k dxf)
This DXF drawing shows the locations of all of the board’s holes.
Exact shipping can be calculated on the view cart page (no login required).
Products that weigh more than 0.5 KG may cost more than what's shown (for example, test equipment, machines, >500mL liquids, etc).
We deliver Australia-wide with these options (depends on the final destination - you can get a quote on the view cart page):
- $3+ for Stamped Mail (typically 10+ business days, not tracked, only available on selected small items)
- $7+ for Standard Post (typically 6+ business days, tracked)
- $11+ for Express Post (typically 2+ business days, tracked)
- Pickup - Free! Only available to customers who live in the Newcastle region (must order online and only pickup after we email to notify you the order is ready). Orders placed after 2PM may not be ready until the following business day.
Non-metro addresses in WA, NT, SA & TAS can take 2+ days in addition to the above information.
Some batteries (such as LiPo) can't be shipped by Air. During checkout, Express Post and International Methods will not be an option if you have that type of battery in your shopping cart.
International Orders - the following rates are for New Zealand and will vary for other countries:
- $12+ for Pack and Track (3+ days, tracked)
- $16+ for Express International (2-5 days, tracked)
If you order lots of gear, the postage amount will increase based on the weight of your order.
Our physical address (here's a PDF which includes other key business details):
40 Aruma Place
Cardiff
NSW, 2285
Australia
Take a look at our customer service page if you have other questions such as "do we do purchase orders" (yes!) or "are prices GST inclusive" (yes they are!). We're here to help - get in touch with us to talk shop.
Have a product question? We're here to help!
 Pololu Ball Caster with 3/8" Metal BallSKU: POLOLU-951 Brand: PololuThis small ball caster uses a 3/8" diameter metal ball. The height of the assemb ...
Pololu Ball Caster with 3/8" Metal BallSKU: POLOLU-951 Brand: PololuThis small ball caster uses a 3/8" diameter metal ball. The height of the assemb ...- Pololu Micro Metal Gearmotor Bracket Extended PairSKU: POLOLU-1089 Brand: PololuThis compact bracket enables convenient mounting of popular, Sanyo-style micro m ...
- Pololu Wheel 60x8mm Pair - BlackSKU: POLOLU-1420 Brand: PololuThese black plastic wheels press-fit onto the 3mm D shafts on many of Pololu's m ...
- Pololu 5" Robot Chassis RRC04A Solid Light-BlueSKU: POLOLU-1504 Brand: PololuThis chassis base plate is a round piece of 1/8" (3 mm) acrylic with a 5" (127 m ...




Videos
View AllGuides

The Maker Revolution

Getting Hands-on with Sensors
Projects

WhyzaGC - Feather ESP32 addon to the MightyOhm Gieger Counter

Makers love reviews as much as you do, please follow this link to review the products you have purchased.
Product Comments